公司總部:
銷售熱線(24小時):

Prescan與Amesim聯合仿真(三)——動力學模型替換
1.概述
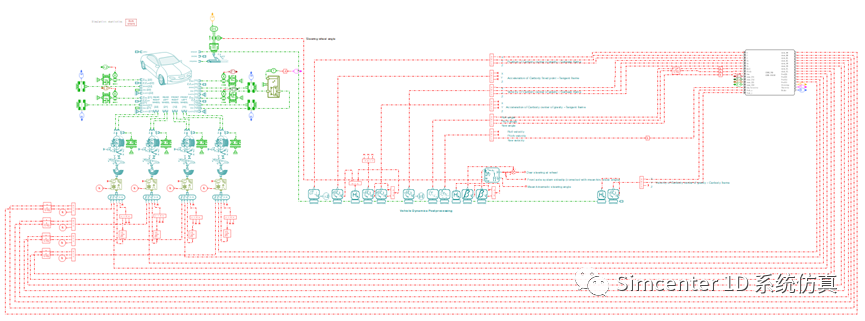
2.創建高精度車輛動力學模型
 其中Simulink接口模塊接口如下:
其中Simulink接口模塊接口如下: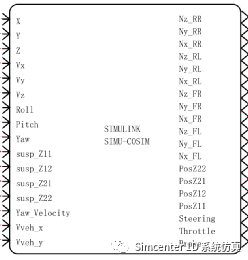 Amesim輸出到Simulink端口信號
Amesim輸出到Simulink端口信號
| 序號 | 端口名稱 | 描述 | 備注 |
| 1 | X | Amesim中Galilean坐標系下車輛質心的x坐標 | Amesim中的Galilean對應Prescan中的Initial local axis system |
| 2 | Y | Amesim中Galilean坐標系下車輛質心的y坐標 | |
| 3 | Z | Amesim中Galilean坐標系下車輛質心的z坐標 | |
| 4 | Vx | Amesim中Galilean坐標系下車輛質心的x向速度 | |
| 5 | Vy | Amesim中Galilean坐標系下車輛質心的y向速度 | |
| 6 | Vz | Amesim中Galilean坐標系下車輛質心的z向速度 | |
| 7 | Roll | Amesim中Galilean坐標系下車輛繞X軸的角度 | |
| 8 | Pitch | Amesim中Galilean坐標系下車輛繞Y軸的角度 | |
| 9 | Yaw | Amesim中Galilean坐標系下車輛繞Z軸的角度 | |
| 10 | susp_Z11 | 左前輪的垂向位移(靜力平衡時為0) | |
| 11 | susp_Z12 | 右前輪的垂向位移(靜力平衡時為0) | |
| 12 | susp_Z21 | 左后輪的垂向位移(靜力平衡時為0) | |
| 13 | susp_Z22 | 右后輪的垂向位移(靜力平衡時為0) | |
| 14 | Yaw_Velocity | Amesim中Galilean坐標系下車輛橫擺角速度 | |
| 15 | Vveh_x | Amesim中Carbody坐標系下車輛質心的x向速度 | |
| 16 | Vveh_y | Amesim中Carbody坐標系下車輛質心的y向速度 |
| 序號 | 端口名稱 | 描述 | 備注 |
| 1 | Brake | Simulink中計算的剎車扭矩,單位:[Nm] | |
| 2 | Throttle | Simulink中計算的動力總成輸出扭矩,單位:[Nm] | |
| 3 | Steering | Simulink中計算的方向盤轉角,單位:[deg] | |
| 4 | PosZ11 | Simulink中計算的左前輪接地點垂向高度 | |
| 5 | PosZ12 | Simulink中計算的右前輪接地點垂向高度 | |
| 6 | PosZ21 | Simulink中計算的左后輪接地點垂向高度 | |
| 7 | PosZ22 | Simulink中計算的右后輪接地點垂向高度 | |
| 8 | Nx_FL | 左前輪接地點朝向的x向分量 | 模為1 |
| 9 | Ny_FL | 左前輪接地點朝向的y向分量 | |
| 10 | Nz_FL | 左前輪接地點朝向的z向分量 | |
| 11 | Nx_FR | 右前輪接地點朝向的x向分量 | 模為1 |
| 12 | Ny_FR | 右前輪接地點朝向的y向分量 | |
| 13 | Nz_FR | 右前輪接地點朝向的z向分量 | |
| 14 | Nx_RL | 左后輪接地點朝向的x向分量 | 模為1 |
| 15 | Ny_RL | 左后輪接地點朝向的y向分量 | |
| 16 | Nz_RL | 左后輪接地點朝向的z向分量 | |
| 17 | Nx_RR | 右后輪接地點朝向的x向分量 | 模為1 |
| 18 | Ny_RR | 右后輪接地點朝向的y向分量 | |
| 19 | Nz_RR | 右后輪接地點朝向的z向分量 |
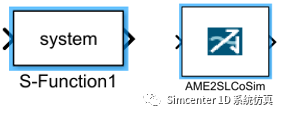
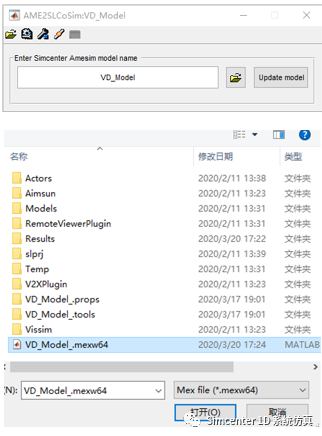
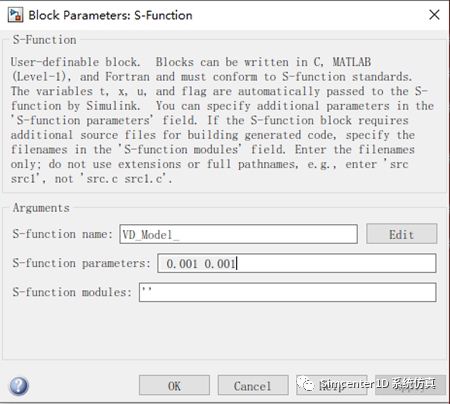 其中S-function parameters參數,第一個是采樣時間,要求與Simulink的計算步長保持一致;第二個是print interval,最好也和前者保持一致。設置完成后,運行Simulink模型即可顯示出Amesim模型各接口名稱。采用第二種方式,雙擊打開AME2SLCoSim模塊,選擇“模型名--_.mexw64”文件即可。仿真參數以Amesim中Run parameters設置為準。
其中S-function parameters參數,第一個是采樣時間,要求與Simulink的計算步長保持一致;第二個是print interval,最好也和前者保持一致。設置完成后,運行Simulink模型即可顯示出Amesim模型各接口名稱。采用第二種方式,雙擊打開AME2SLCoSim模塊,選擇“模型名--_.mexw64”文件即可。仿真參數以Amesim中Run parameters設置為準。